Schauen wir auf das Thema künstliche Intelligenz, dann können wir zum aktuellen Zeitpunkt zwei Beobachtungen machen. Führt die KI lediglich die Schritte aus, die ihr vom Menschen vorgegeben wurden, dann sehen wir eindrucksvolle Ergebnisse. Ein Beispiel ist die KI von Clearview, die in Sekundenschnelle (fast) jedes beliebige Gesicht erkennen kann. Schauen wir andererseits auf Roboter, die sich essenzielle Dinge selber beibringen sollen (beispielsweise das Laufen), dann sind die Ergebnisse eher ernüchternd und es ist immer wieder menschliche Unterstützung vonnöten.
Das ändert sich nun mit einem System, das das Forschungsteam von Google entwickelt hat. Bisher konnten Roboter zwar schon sich von selbst fortbewegen, fiel dieser aber um oder verließ das vorab definierte Gebiet, dann war die Maschine aber häufig mit ihrem Latein am Ende. Ein Grund ist, dass vor einem Feldeinsatz der Roboter und seine Umgebung im Computer modelliert und trainiert werden. Weicht dann die tatsächliche Umgebung des physischen Roboters von der vorher simulierten Umgebung stark ab, dann ist die KI überfordert und irrt hilflos durch die Gegend.

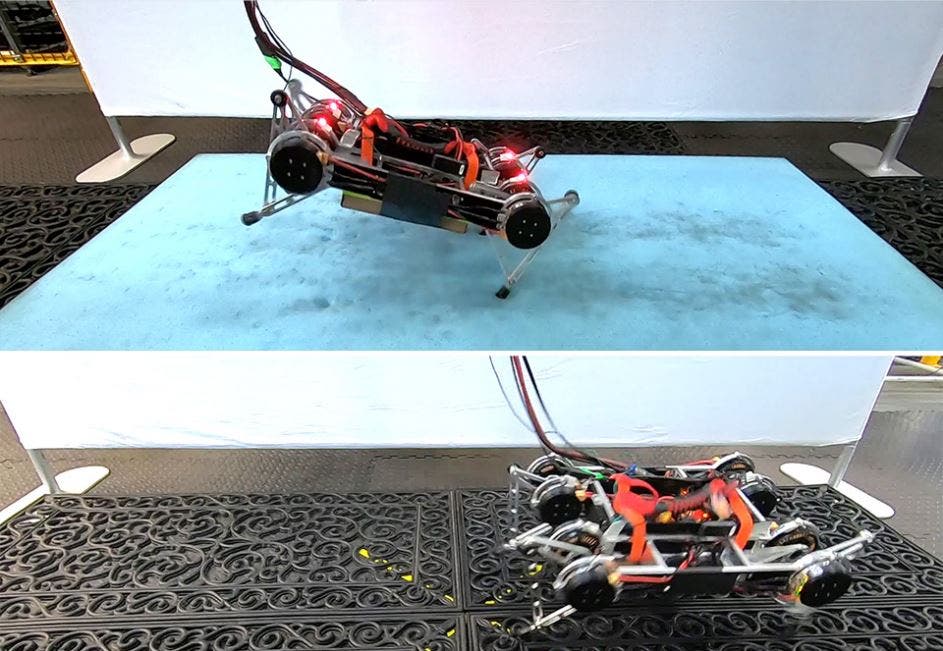
Mit dem neuen System, das vorwiegend auf bestehenden Algorithmen aufbaut, kann die KI jetzt aber selbstständig das Laufen in unterschiedlichen Umgebungen erlernen. MIT Technology Review berichtet, dass der Roboter dabei selbstständig geradeaus, rückwärts, nach links oder nach rechts navigieren kann. Die Forscherinnen und Forscher übersprangen einfach die Simulation und trainierten die Maschine direkt im Labor. Neben geraden Wegen kann die KI inzwischen selbstständig Steigungen, Stufen und Hindernisse beherrschen.
Sorgen über eine Revolution der Roboter müssen wir uns aber nach wie vor nicht machen. Jie Tan, der die Studie begleitete, spricht davon, dass man auch bei diesem Ansatz noch Hunderte Male der KI unter die Arme greifen muss. Deshalb steckte man einen festen Bereich mit unterschiedlichen Hindernissen ab und brachte dem Roboter bei, beim Erreichen der Grenzen umzudrehen. Auch das Aufstehen nach einem Sturz wurde vorab programmiert.
In der Öffentlichkeit werden wir die Maschinen erst mal nicht sehen. Zum aktuellen Zeitpunkt hängt über dem Testgebiet immer noch ein Motion Capture-System, um den Roboter zu orten. Im echten Leben wäre das nicht ohne Weiteres möglich. Die Forscher geben dennoch nicht auf. Der Algorithmus soll so weiterentwickelt werden, dass unterschiedliche Roboter zur gleichen Zeit in der gleichen Testumgebung trainieren können. Vielleicht wird eines Tages die künstliche Intelligenz tatsächlich intelligent.
Mehr zum Thema KI: